您正在浏览的页面需要登录,为了提高您的阅读体验,请在右上角登录您的账号!
您需要 登录 才可以下载或查看,没有帐号?立即注册
x
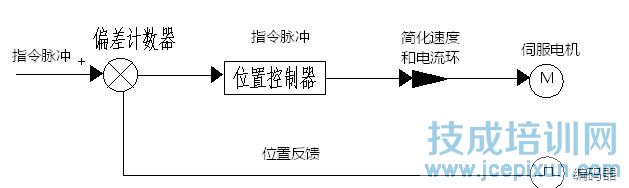
来自上位机的指令脉冲输入(和内部脉冲量给定)与来自编码器的位置反馈脉冲,通过位置比较环的计算获得位置偏差信号,位置偏差信号经过位置控制器的处理(通常为P比例调节,在特殊情况下,也有选择PI比例积分调节)。生成速度环的速度给定指令信号,在通过速度控制数和电流控制器去控制电机的转速。
位置偏差量在转速换成速度给定指令过程中,其速度给定指令的大小由位置比例增益参数Kp来规定,因此,Kp参数设置越大,控制反应越迅速,成为刚性比较硬,反之,刚性比较软(即反应慢)。脉冲偏差易经过位置控制器乘上比例增益常数Kp,转变为速度给定指令,多以说位置控制器就是一个比例控制器。
脉冲偏差量寄存在脉冲偏差计数器中,如果清除脉冲偏差计数器为零,那表示给定速度指令为零速,伺服电机立即停止,这种特性不应用于伺服电机原点回归。
位置控制器的输入量为脉冲偏差量,输出量转换为速度给定量,因此在进行位置控制器,当前位置不等于设置位置时,就产生位置偏差量,进行电机转速的调节,当设置位置和当前位置一致时,电机转速为零,即停止。
脉冲偏差量由两种因素产生,一是上位机发出指令脉冲给驱动器,编码器反馈脉冲存在延时滞后,产生脉冲偏差量,另一部分是由于处于产生好的,当电机因负载变化,电机转轴产生相对位移,造成位置偏差量,这些都由编码器检测出来,反馈给驱动器。
| 




 发表于 2017-1-13 10:53:19
发表于 2017-1-13 10:53:19
 发表于 2017-1-14 23:27:14
发表于 2017-1-14 23:27:14